
1. 本記事の目的
本記事では、Windows環境上のWSL2にUbuntu 24.04を導入し、
ROS2 Jazzy(フル構成・GUI含む)をインストールする手順を整理します。
目的は単なるインストールではありません。
- 再現可能なROS2開発環境を構築する
- 実機検証前の統合実験基盤を整える
- Windows環境でも本格的なROS2開発を可能にする
すなわち「開発基盤の確立」が本記事の狙いです。
2. WSL2でROS2を利用する理由
2.1 メリット
- WindowsとLinuxを同時利用できる
- 環境の再構築が容易(破壊の影響が小さい)
- Dockerなど他開発環境と併用しやすい
- Windows 11ではWSLgによりGUI(RViz2)が利用可能
設計・検証段階では、物理マシンを追加せずLinux環境を再現できる点が大きな利点です。
2.2 デメリット(直接Ubuntuと比較)
| 項目 | WSL2 | 直接Ubuntu |
|---|---|---|
| ネットワーク | NAT構成 | 物理LAN直結 |
| USBデバイス | 制限あり | 直接利用可能 |
| リアルタイム性 | 限定的 | 有利 |
最終的な実機検証や産業用途では直接Ubuntu環境が望ましい場合もありますが、
統合設計および初期検証用途としてはWSL2で十分です。
3. WSL2でUbuntu 24.04を導入する
3.1 インストール
PowerShell(管理者)で実行します。
wsl --install -d Ubuntu-24.04
再起動後、ユーザー作成を行います。
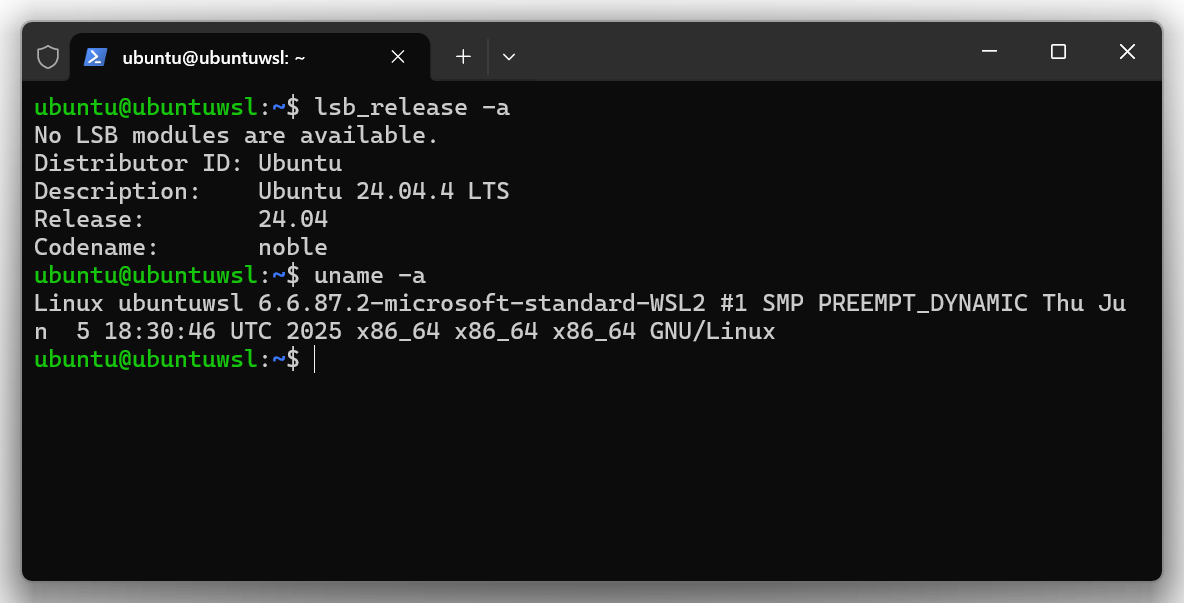
3.2 正常確認
lsb_release -a
確認項目:
- Distributor ID: Ubuntu
- Release: 24.04
uname -r
WSL用カーネルが表示されれば正常です。
lsb_release -a と uname -r のスクリーンショットの例です。
3.3 初期アップデート
sudo apt update sudo apt upgrade -y
確認:
sudo apt list --upgradable
アップグレード対象が無ければ最新状態です。
4. ROS2 Jazzy のインストール
4.1 事前説明(設計意図)
ROS2はUbuntu標準リポジトリには含まれていません。
そのため、ROS公式GPGキー登録および専用リポジトリ追加が必要です。
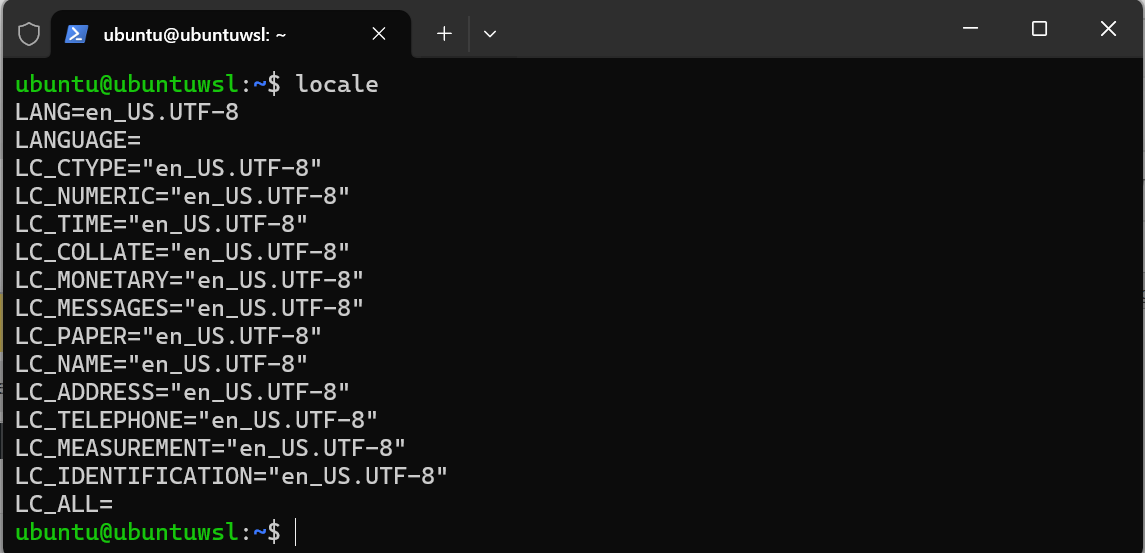
4.2 Locale設定(UTF-8)
locale
UTF-8でない場合:
sudo apt install locales sudo locale-gen en_US en_US.UTF-8 sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8 export LANG=en_US.UTF-8
再確認:
locale
LANGがUTF-8になっていれば正常です。
スクリーンショットの例です。
4.3 Universeリポジトリ有効化
sudo apt install software-properties-common sudo add-apt-repository universe
4.4 ROS2 GPGキー登録
sudo apt install curl -y sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key \ -o /usr/share/keyrings/ros-archive-keyring.gpg
4.5 ROS2リポジトリ追加
echo "deb [arch=$(dpkg --print-architecture) \
signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] \
http://packages.ros.org/ros2/ubuntu noble main" | \
sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
確認:
cat /etc/apt/sources.list.d/ros2.list
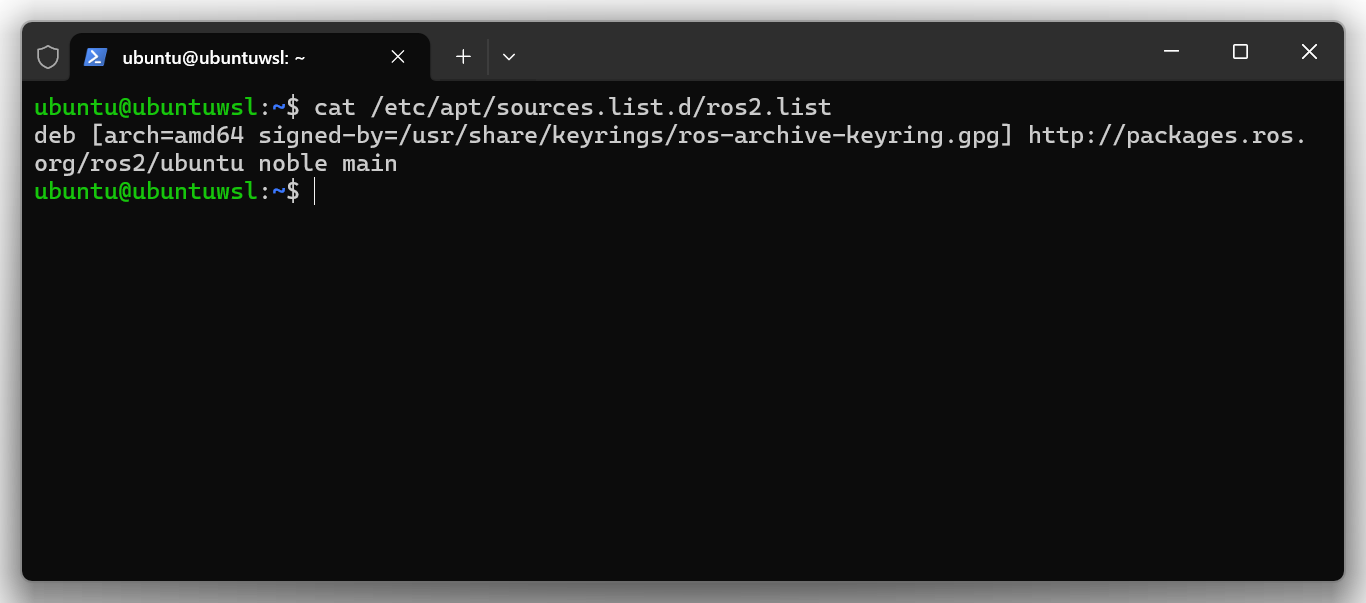
ros2のパッケージがあります。
4.6 更新
sudo apt update
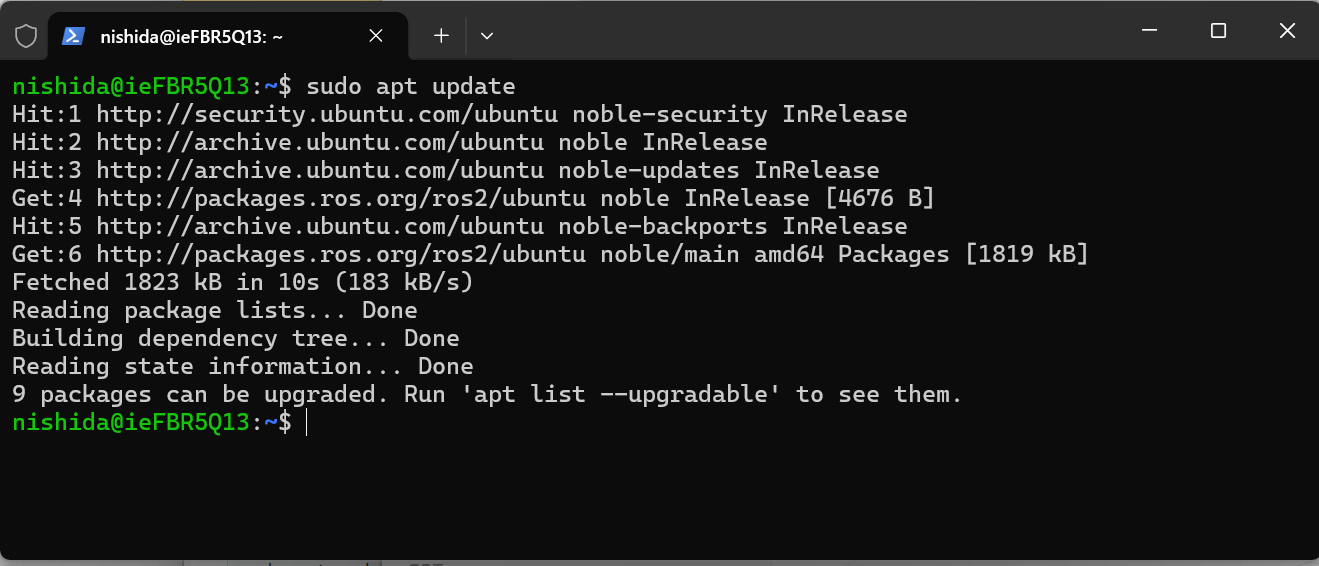
エラーが無いことを確認します。
※このupdateは抜かさないように気を付けてください。
4.7 フル(GUI含む)インストール
sudo apt install ros-jazzy-desktop -y
RViz2やデモノードを含むフル構成です。しばらくかかります。もし、進まないようでしたら、前項のupdateをとばした可能性もあります。以下のように完了しました。
4.8 環境変数設定
echo "source /opt/ros/jazzy/setup.bash" >> ~/.bashrc source ~/.bashrc
確認:
echo $ROS_DISTRO
「jazzy」と表示されれば正常です。
5. 動作確認
5.1 診断
ros2 doctor
ERRORが無いことを確認します。
5.2 ノード通信確認
ターミナル1:
ros2 run demo_nodes_cpp talker
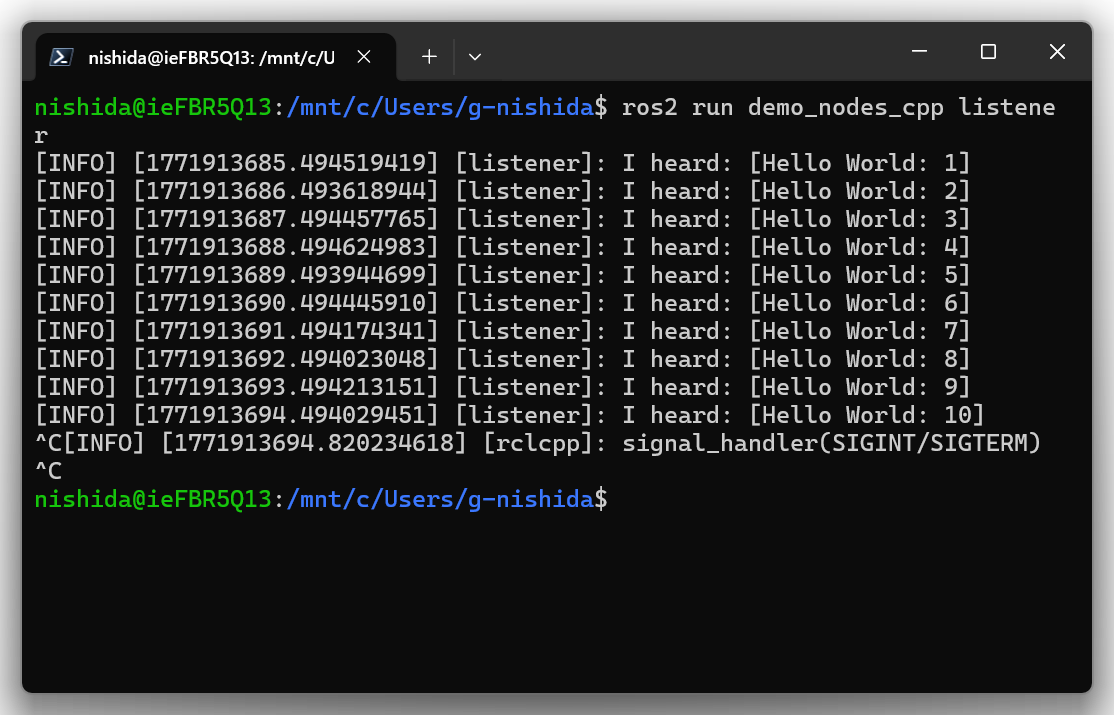
ターミナル2:
ros2 run demo_nodes_cpp listener
以下のようにlistener側にメッセージが表示されればDDS通信は正常です。ctrl+cで止めました。
5.3 RViz2 GUI確認
rviz2
確認項目:
- ウィンドウが表示される
- 3Dビューが表示される
- Displayパネルが正常表示される
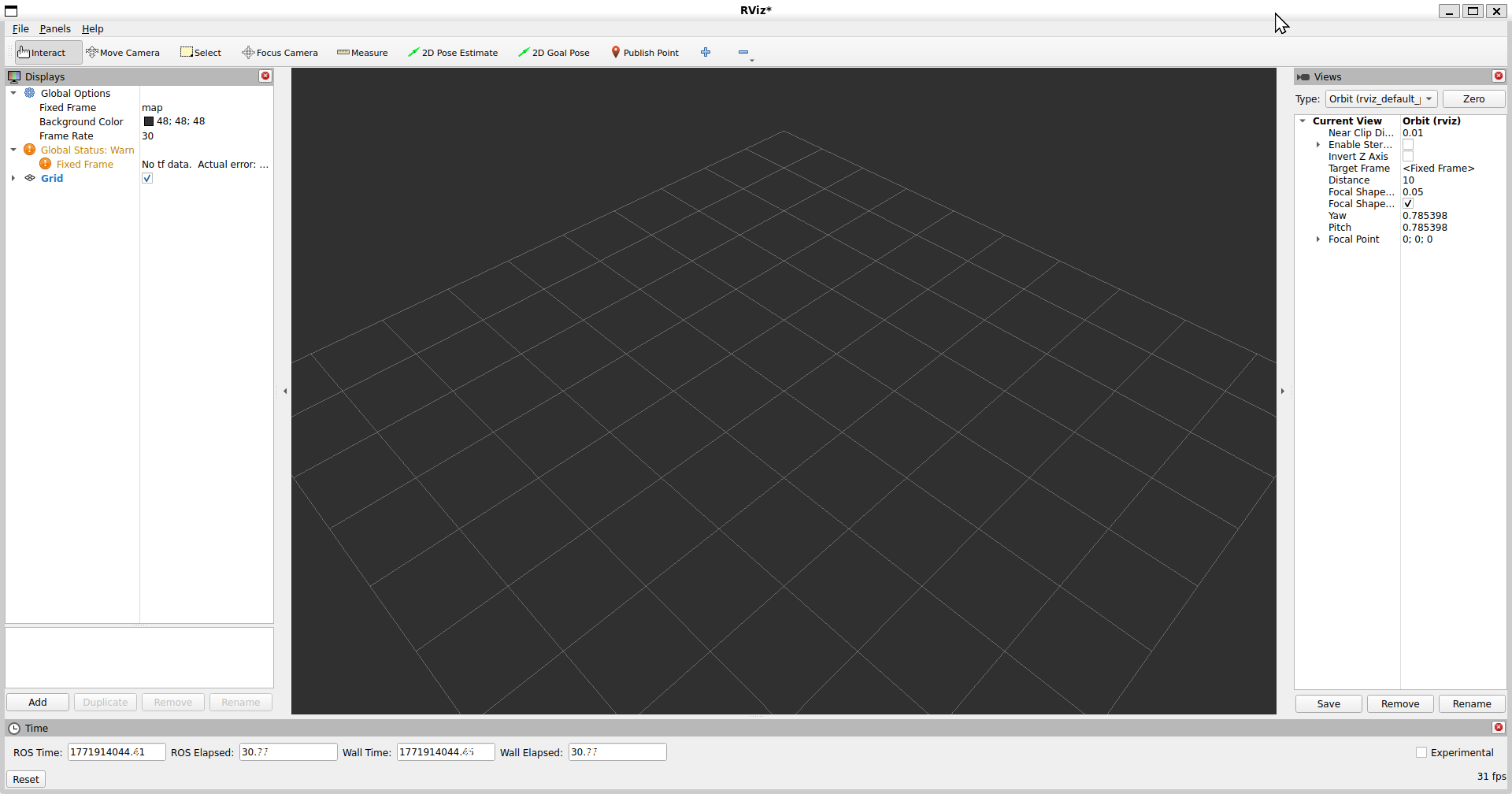
Windows上でそのまま動作するというのがありがたいです。
付録:colcon と rosdep のインストール(ビルド環境の整備)
ここまで ROS2 Jazzy(desktop版)のインストールは完了していますが、
自作パッケージをビルドするためには追加ツールが必要です。
ここでは、
- colcon
- rosdep
の導入を行います。
1. colcon のインストール
colcon は ROS2 の標準ビルドツールです。
ワークスペース(例:ros2_ws)内のパッケージをまとめてビルドする際に使用します。
sudo apt update
sudo apt install -y python3-colcon-common-extensions
python3-colcon-common-extensions には以下が含まれています。
- colcon 本体
- CMake 用拡張
- Python 用拡張
- ROS 用拡張
インストール確認:
colcon version-check
ちょっと長いですが、バージョン一覧が表示されれば正常です。
2. rosdep のインストール
rosdep は、パッケージの依存関係を解決するためのツールです。
GitHub 等から外部パッケージを取得する場合や、
将来的に複数パッケージを扱う場合には必須となります。
インストール手順:
sudo apt install -y python3-rosdep
初回のみ、初期化を行います。
sudo rosdep init
rosdep update
これで依存関係のデータベースが準備されます。
3. なぜこの2つが必要か
ROS2 desktop版には RViz や TF などの実行環境は含まれていますが、
- パッケージのビルド
- 外部パッケージの依存解決
までは自動では整いません。
そのため、
- colcon → ビルド用
- rosdep → 依存解決用
として追加導入します。
4. 今回の用途との関係
本記事の仮想オドメトリー例では、
- Python ノード作成
- TF 追加
- ワークスペースビルド
を行うため、colcon が必要です。
また、今後 rosbridge や他パッケージと連携する場合にも
rosdep が活用されます。
補足(WSLg 利用時)
WSLg 環境では GUI はそのまま利用できますが、
将来的に RViz の描画が不安定な場合は、
export LIBGL_ALWAYS_SOFTWARE=1
を設定することでソフトウェア描画に切り替えることができます。
6. まとめ
本手順により、
Windows上に再現可能なROS2統合実験基盤が構築されました。
次段階として、
ワークスペース構築、自作ノード実装、実機連携へ進むことが可能です。