
はじめに ― 前回からの続きとして
今回は、前回のROS2で「動かす」ために押さえておきたい考え方の続きです。
前回では、ROS2 における座標系、オドメトリ、変換について、
研究的な定義ではなく、エンジニアが「動かす」ための視点で整理しました。
今回は、その前提を踏まえたうえで、
実際にノードを動かしながら挙動を確認する回です。
ただし、まだ rviz(GUIツール) は使いません。
可視化は行わず、ターミナルに表示される数値とログだけを見て進めます。
目的はシンプルに以下です。
cmd_vel の命令と、
ロボット目線での「動いている感覚」が一致していることを体感する。
今回やること・やらないこと
今回やることは、次の3点だけです。
・teleop を使って cmd_vel を送る
・仮想オドメトリで /odom を生成する
・ターミナル上の表示から「どう動いているか」を確認する
一方で、今回は以下のことは行いません。
・rviz(GUI) による可視化
・tf の詳細な説明
・地図(map)
・自律走行や Nav2
あくまで、最小構成で理解を深めることを目的とします。
仮想オドメトリを生成する virtual_odometry_node
まずは、今回の構成の一つの主役である
virtual_odometry_node について説明します。
このノードは、実際のセンサーやモーターを使わずに、
/cmd_vel の命令と時間の経過だけから
仮想的なオドメトリ(/odom)を生成するノードです。
「命令どおりにロボットが完璧に動いたとしたら、
今どこにいるはずか?」を計算していると考えると分かりやすいでしょう。
このような構成にすることで、
- cmd_vel の意味
- オドメトリが何を表しているか
- 座標系の違い
を、センサー誤差などを気にせずに確認できます。
virtual_odometry_node.py(ソースコード)
#!/usr/bin/env python3
import math
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import Twist
from geometry_msgs.msg import Quaternion
from nav_msgs.msg import Odometry
def yaw_to_quaternion(yaw: float) -> Quaternion:
"""
yaw(ラジアン)から Quaternion を生成する。
今回は平面移動のみなので roll, pitch は 0。
"""
q = Quaternion()
q.x = 0.0
q.y = 0.0
q.z = math.sin(yaw / 2.0)
q.w = math.cos(yaw / 2.0)
return q
class VirtualOdometryNode(Node):
"""
/cmd_vel を入力として、仮想的に自己位置 (x, y, theta) を計算し、
/odom (nav_msgs/Odometry) を publish するノード。
"""
def __init__(self):
super().__init__('virtual_odometry_node')
# ===== 内部状態(自己位置)=====
self.x = 0.0
self.y = 0.0
self.theta = 0.0 # yaw [rad]
# ===== 最新の速度指令 =====
self.v = 0.0 # linear.x [m/s]
self.w = 0.0 # angular.z [rad/s]
# ===== パラメータ =====
self.dt = 0.1 # 更新周期 [s](10Hz)
# ===== Subscriber: /cmd_vel =====
self.create_subscription(
Twist,
'/cmd_vel',
self.cmd_vel_callback,
10
)
# ===== Publisher: /odom =====
self.odom_pub = self.create_publisher(
Odometry,
'/odom',
10
)
# ===== タイマー =====
self.create_timer(self.dt, self.update_odometry)
self.get_logger().info('Virtual Odometry Node started.')
def cmd_vel_callback(self, msg: Twist):
"""
/cmd_vel を受信し、最新の速度指令を保存する
"""
self.v = msg.linear.x
self.w = msg.angular.z
def update_odometry(self):
"""
速度指令を積分して自己位置を更新し、/odom を publish
"""
# --- オドメトリ計算 ---
self.x += self.v * math.cos(self.theta) * self.dt
self.y += self.v * math.sin(self.theta) * self.dt
self.theta += self.w * self.dt
# --- Odometry メッセージ作成 ---
odom = Odometry()
odom.header.stamp = self.get_clock().now().to_msg()
odom.header.frame_id = 'odom'
odom.child_frame_id = 'base_link'
# 位置
odom.pose.pose.position.x = self.x
odom.pose.pose.position.y = self.y
odom.pose.pose.position.z = 0.0
# 姿勢(yaw → quaternion)
odom.pose.pose.orientation = yaw_to_quaternion(self.theta)
# 速度(そのまま反映)
odom.twist.twist.linear.x = self.v
odom.twist.twist.angular.z = self.w
# --- publish ---
self.odom_pub.publish(odom)
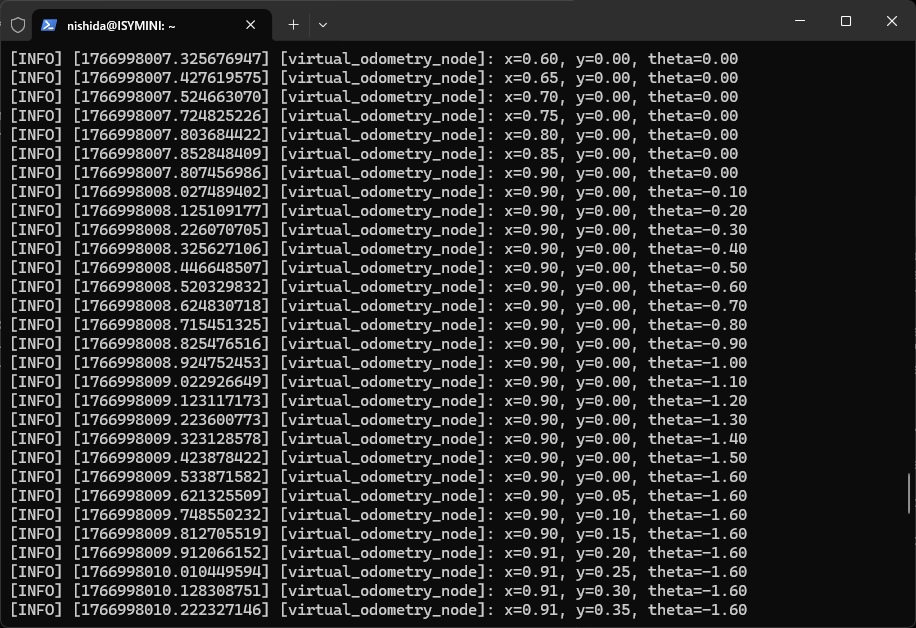
# --- ログ出力 ---
self.get_logger().info(
f'x={self.x:.2f}, y={self.y:.2f}, theta={self.theta:.2f}'
)
def main(args=None):
rclpy.init(args=args)
node = VirtualOdometryNode()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
virtual_odometry_node がやっていること
このノードでは、以下の処理を行っています。
/cmd_velを購読する- ロボット目線の速度(前進速度・角速度)を受け取る
- ロボットの向きを考慮して、ワールド座標での移動量に変換する
- その結果を
/odomとして配信する
ここで使われている変換式は、
ロボット目線の命令をワールド座標に写し替えている
だけです。
数式の導出を理解する必要はありません。
重要なのは、
/cmd_velはロボット目線/odomはワールド座標
という役割分担が、コードとしてそのまま表れている点です。
odom_analyzer_node を使って動きを「読む」
odom_analyzer_node は、ROS2 の /odom トピックを購読し、
ロボットが「今どう動いているか」を人間に分かりやすい形で表示するためのノードです。
rviz のような可視化ツールは使わず、
ターミナル上に 1 行で状態を表示します。
これにより、/cmd_vel の命令と、
実際のオドメトリの変化を直接結び付けて確認できます。
このノードでやっている「変換」の意味
/odom に含まれる位置情報(x, y)は、
ワールド座標系で表現されています。
これは、ロボットがどれだけ向きを変えても動かない、
上から見下ろすような固定された座標系です。
一方で、人がロボットの動きを理解するときは、
「前進している」「後退している」「左に回っている」といった
ロボット目線での表現の方が直感的です。
odom_analyzer_node では、
ワールド座標系で表現された移動量(dx, dy)を、
ロボットの向き(theta)を使ってロボット前方向に投影します。
これにより、
- 前進しているのか
- 後退しているのか
- 旋回しているのか(左/右)
を判定しています。
ここで重要なのは、数式そのものではなく、
「ワールド座標の結果を、ロボット目線で解釈し直している」
という点です。
これは、前回で説明した
「変換は数学の問題ではなく、アプリケーションの都合である」
という考え方そのものです。
odom_analyzer_node.py(ソースコード)
#!/usr/bin/env python3
import math
import sys
import rclpy
from rclpy.node import Node
from nav_msgs.msg import Odometry
class OdomAnalyzerNode(Node):
"""
/odom を subscribe し、
ロボットの向きに対する前進/後退・旋回を投影計算で判定するノード
"""
def __init__(self):
super().__init__('odom_analyzer_node')
self.prev_x = None
self.prev_y = None
self.prev_theta = None
self.create_subscription(
Odometry,
'/odom',
self.odom_callback,
10
)
self.get_logger().info(
'Odom Analyzer Node started (projection-based interpretation).'
)
def odom_callback(self, msg: Odometry):
# --- 現在の位置 ---
x = msg.pose.pose.position.x
y = msg.pose.pose.position.y
# --- quaternion → yaw ---
q = msg.pose.pose.orientation
theta = math.atan2(
2.0 * (q.w * q.z),
1.0 - 2.0 * (q.z * q.z)
)
# 初回は初期化のみ
if self.prev_x is None:
self.prev_x = x
self.prev_y = y
self.prev_theta = theta
return
# --- 差分 ---
dx = x - self.prev_x
dy = y - self.prev_y
dtheta = theta - self.prev_theta
# --- ロボット前方向への投影 ---
forward = dx * math.cos(theta) + dy * math.sin(theta)
# --- 状態判定 ---
if abs(forward) < 0.005:
move_str = 'STOP'
elif forward > 0:
move_str = 'FORWARD'
else:
move_str = 'BACKWARD'
if abs(dtheta) < 0.02:
turn_str = 'STRAIGHT'
elif dtheta > 0:
turn_str = 'LEFT'
else:
turn_str = 'RIGHT'
# --- 1行ステータス表示 ---
sys.stdout.write(
f'\r'
f'[STATUS] '
f'x={x:6.2f} '
f'y={y:6.2f} '
f'theta={theta:6.2f} | '
f'move={move_str:8s} ({forward:6.3f}m) | '
f'turn={turn_str:8s} ({dtheta:6.3f}rad) '
)
sys.stdout.flush()
# 更新
self.prev_x = x
self.prev_y = y
self.prev_theta = theta
def main(args=None):
rclpy.init(args=args)
node = OdomAnalyzerNode()
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
finally:
print()
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
パッケージ構成
本記事では、以下のようなパッケージ構成を前提とします。
ros2_ws/
└── src/
└── virtual_odometry/
├── virtual_odometry/
│ ├── virtual_odometry_node.py
│ └── odom_analyzer_node.py
├── package.xml
└── setup.py
setup.py のエントリーポイント設定
entry_points={
'console_scripts': [
'virtual_odometry_node = virtual_odometry.virtual_odometry_node:main',
'odom_analyzer_node = virtual_odometry.odom_analyzer_node:main',
],
},
ビルド方法
ワークスペースのルートで以下を実行します。
cd ~/ros2_ws
colcon build
source install/setup.bash
ノードが見つからない場合は、
source install/setup.bash を実行しているかを確認してください。
ノードの実行方法(ターミナルを3つ使用)
① 仮想オドメトリノード
ros2 run virtual_odometry virtual_odometry_node
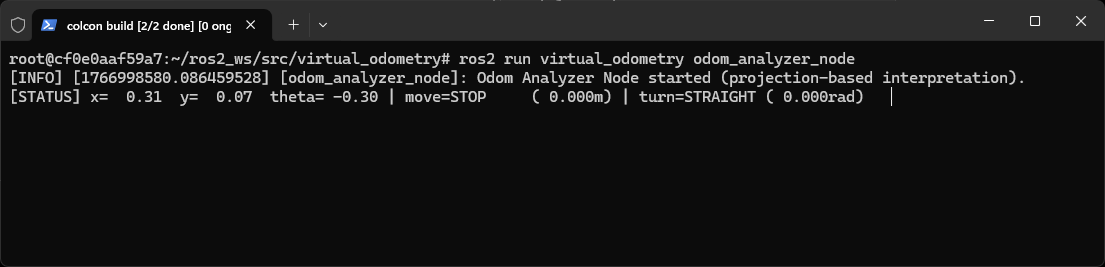
② odom_analyzer_node
ros2 run virtual_odometry odom_analyzer_node
起動すると、ターミナルに 1 行で状態が表示され続けます。
③ teleop_twist_keyboard
ros2 run teleop_twist_keyboard teleop_twist_keyboard
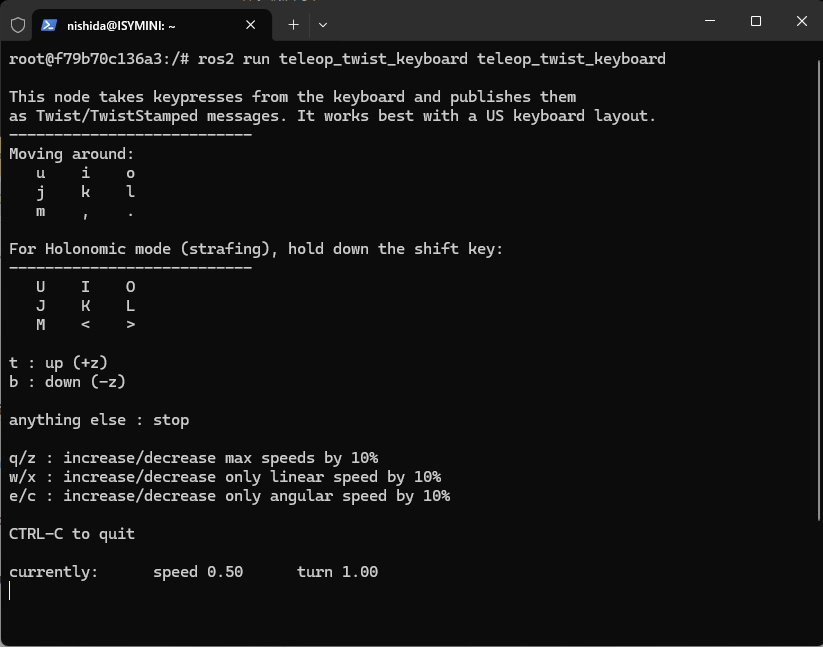
キーボードで前後左右操作するイメージです。
インストールされていない場合は以下のようにインストールします。
apt update
apt install ros-humble-teleop-twist-keyboard
確認ポイント
- 前進操作で
move=FORWARD、x が増える - 後退操作で
move=BACKWARD、x が減る - 左旋回で
turn=LEFT、theta が増える - 右旋回で
turn=RIGHT、theta が減る
cmd_vel の命令と、オドメトリの変化が
ロボット目線で一致していることを確認してください。
補足:今回の実行環境について
本記事の内容は、Docker コンテナ上の ROS2 Humble 環境で動作確認しています。
- ホストOS:Windows 11
- 実行環境:WSL2 + Docker
- ROS2:Humble
以下の記事で構築方法等を書いています。
Windows 11 で ROS2 を最速体験する:Docker環境構築ガイド
今回使用しているノードは、センサーや実機ハードウェアに依存しないため、
Linux 環境(PC直インストール、Raspberry Pi、VPS など)でも同様に動作します。
まとめ
今回は、
/cmd_vel と /odom の関係を
ターミナル上だけで確認しました。
ワールド座標で表現されたオドメトリを、
ロボット目線で解釈することで、
「今どう動いているか」を安心して読み取ることができます。
今回はここまでです。また書きたいと思います。
ソース一式は以下で公開しています。